
《传播创新研究》是由武汉大学媒体发展研究中心(教育部人文社会科学重点研究基地)主办的学术集刊,以中国传播问题为出发点,“在场”地感知中国传播的难点、疑点与热点,创新重建交流与社会连接的传播行动,发掘比较视角下的传播智慧,进而激活传播创新的实践与理论发展,纾解人类交流的困境与无奈。本辑由传播与社会、乡村传播、国际传播、智能传播、经济传播和博物馆传播专题研究六个部分组成,从不同角度分析了传播创新研究现状。
本次推送《“人型电脑天使心”:人机共情的理论基础与实践路径探析》,作者徐明华、王美琳。
“人型电脑天使心”:人机共情的理论基础与实践路径探析
徐明华 王美琳
摘 要:智能机器人时代,“人类社交”逐渐向“人机社交”过渡,机器人人性化的外表、温柔的话语、细致入微的爱护与陪伴,激发了人类的情感交流欲望,构建了新型人机共情关系。本文以智能机器人为研究主体,讨论了新型人机共情关系的理论基础和实践路径,并结合计算机科学的研究模型,尝试建构了“移情—拟情—共情”的新型人机共情模型。同时,作为技术赋权的产物之一,人机共情可能面临机器人情绪价值受限、对机器人情绪独立性存疑的问题。本文结合学界最新的研究成果,论证了机器人共情能够适度脱离算法桎梏,由模仿向自主性进化的可能性,并指出,未来机器人获得共情的能力仍需回归人机交互的生活实践,以期为助推人与技术的良性互动提供一定的思考。
关键词:智能机器人;人机关系;人机共情模型
近年来,人工智能和神经科学两个领域飞速发展,有关智能机器人的研究再次成为全球关注的热点。学者默里·沙纳汉曾预言,技术的进步,将会使技术“奇点”突破寒冬,加速到来。人工智能时代,智能机器人逐渐渗透家庭教育、医疗服务、日常社交等人类场域,以高度拟人化特征和强大的共情力,在信息传播、日常陪护和情感交流等方面发挥着越来越重要的作用。“人+社交机器人”的传播格局已成为一种可想象的社会图景,而以人类为主体的传统共情关系,也将逐渐演变为“人+机器人”的新型共情关系。
作为学界的热点议题,目前传播学者主要发力于对人机交往模式的探究和对人机交往伦理问题的分析,而对于交往的“黏合剂”——共情的研究寥寥无几,对于人机互动中的共情关系考察更是付之阙如,研究的内容也大多是离散在非传播学的学科领域,例如计算机科学的情感测量研究、心理科学的移情因素研究。值得注意的是,由于对于虚拟社交机器人的研究已经多如繁星,本文所探讨的机器人,并非是社交媒体上“模拟人类用户,自主运行、自动生产发布内容的算法智能体”,而是那些能够遵循社会行为和规则,能够和人类面对面交流沟通的陪伴型、情感型的实体机器人,具有高仿真性、高互动性、高情感共鸣性等特征,比如目前市面上照顾儿童的仿真机器人、陪伴老人的护理机器人以及伴侣机器人,后文统称“机器人”。
基于上述背景,本文对“人机共情”的新型共情关系进行了思考:首先,本文论证了从“人人共情”走向“人机共情”的理论基础;其次,本文对“人机共情”的具体实践路径进行了探析,结合计算机科学、心理科学、传播学的研究成果,搭建了新型人机共情模型;最后,本文对“人机共情”可能带来的伦理问题进行了探讨,以及对“机器人的情感究竟是编程之爱还是真正的爱”进行了讨论,对人机关系进行了批判性反思,以期更好地推动人与技术的良性互动。
一、从“人人共情”走向“人机共情”
共情是指个体知觉和理解他人的情绪并做出适当反应的能力,它既是个体产生亲社会行为的重要动机,也是道德行为的基石。最早揭示共情现象的是心理学家Martin Hoffman,他首先定义了“情感移情”的概念,即“人在思想、认知、倾向上进行了认知觉知,从而产生的替代性情感反应”。
随后,以Rizzolatti和Craighero为首的神经科学家提出了“镜像神经元”的概念,指出正是因为镜像神经元的存在,人们才能够第一时间感知他人的情绪和心理,从而产生强烈的共情。近期,大量神经科学实验显示,模仿与共情能力不是复杂的推理与计算过程,激活这组特殊的神经元可以对他人行为进行读取、反思,从而感同身受地理解他人情绪。
“共情”在过去大多出现在美学理论、哲学、心理学的讨论中,但神经科学、心理科学对于镜像神经元的研究,证明了“共情”并不限于文学概念,而是一种真实存在的神经机制,人类本身就具有共情的根基,这为未来新型人机共情关系的出现奠定了生理学基础。
如今已进入智能机器人时代,人类除了与同类建立情感连接,与机器的情感也在不断“升温”,学界围绕智能体的情感研究也日渐丰富,大致可以分为以下两种范式。
一是计算机科学路径,主要关注机器人情感背后的技术问题,如机器人情感计算的技术开发,社交机器人系统,社交机器人与用户交互行为的测量、情感评估、仿真模型搭建、风险性评估等。其中,如何准确识别人类情感并尽可能地模仿人类进行情感回应,是机器人情感研究的热点,比如学者潘志庚等人就对虚拟智能体的情感进行研究,总结了机器人情感的评价因素、情感建模的方法、情感模型的应用系统;学者颜志强等人从神经科学和心理科学的角度出发,基于共情的经典理论,对智能体情感进行理论模型和实证研究的系统化梳理,并对该领域研究宏观现状进行可视化呈现。
二是社会科学研究路径,这一研究路径主要是基于当下“智能机器人”的时代语境———随着人工智能技术、语音合成技术的发展,机器人逐渐从无生命的个体进化为社会关系中重要他者,从而产生了一种“类人际关系”,这种关系实际上也属于一种拟情关系。因此,研究者主要从社会行动者范式出发,围绕人和机器人建立的交往关系、基于此所引发的社会问题进行讨论。相较于单纯考察人机情感,学界更关注人类与机器人的准社会交往路径、人对机器人的态度,除此之外,学界还将目光聚焦于这种交流将会如何构建人机关系,以及人机关系如何影响人类社会的政治权力,其制约因素又有哪些。Paul Dumouchel提出了“人工移情”的概念,并在《与机器人共存》(Living with Robots)一书中指出,共情作为人类“特权”受到挑战,机器人逐渐开始拥有自我意识,换言之,人类不再是共情的唯一主体,人工编码的机器人也可以实现共情。
不管是计算机科学研究路径,还是社会科学研究路径,以上的讨论都在证明一点:共情模型不再是离散的、私人的、内在的,共情主体也不再限于人类自身。虽然大部分机器人的情感目前仍处于“被编码”的状态,但Hod Lipson团队研发的“自主性粒子机器人”证明,机器人已经朝着“有自我意识、会自我复制、有创造力”的方向进化,而且卓有成效。因此,机器人的加入将会打破以人类为中心和主体的传统共情关系,新型人机共情关系得以建构。
但遗憾的是,在传播学领域内,有关人机交往的研究虽然成果颇多,但大多集中在对社交机器人的探讨上,对社交机器人带来的社会层面的影响进行反思和探讨,而针对情感型机器人、陪伴型实体机器人的研究较少,而且学界的焦点集中在“人机社交”,对于“人机共情”浅尝辄止。除此之外,少有研究将计算机科学领域的研究成果,比如机器人共情模型,与传播学的研究问题进行结合。
因此,本文梳理了共情传播的理论与人机传播领域的研究成果,对智能机器人时代新型人机共情关系进行系统化研究,本文拟讨论的问题如下:基于哪些原因、何种途径能够较好地实现人机共情?新型人机共情关系的建构过程是怎样的?人机共情现象的背后,又存在着何种情感伦理风险,我们到底该如何审视机器人技术这把“达摩克利斯之剑”?
“移情”“拟情”“共情”是精神分析学、心理学、伦理学和现象学的核心概念,其用法和含义存在区别。因此,在建立模型之前,本文有必要进行“正本清源”,通过厘清“移情”“拟情”“共情”三个概念之间的相互关联和区别,确定这三个概念在本文语境中的使用方法。
何谓“移情”?“移情”的概念最早来源于弗洛伊德的精神分析学,在美学、现象学和道德哲学的语境中,人们一般将其译为“移情”或“同感”,但在当今的心理治疗中,移情的工作定义是患者在精神治疗过程中的体验,“这种体验由他/她自己的心理结构及过去经历所塑造,并包含从早期重要关系中转移到治疗师身上的感受、态度和行为”。因此,为了避免与“共情”有所混淆,本文采用精神分析学对“移情”的定义,即指将自己的情感或意志“移植”到某人或某种事物身上,简而言之,“移情”更偏向于一种情感的投射,它是某人把过去的一种特殊情感(如爱或恨)投射到另一个人身上,而被移情者只是这种情感的承受者。在本文的新型人机共情模型中,人是发生移情的主体,机器人是被移情的对象客体,是人类情感的首要承受者、观察者。
对于“拟情”的讨论,文学作品中曾出现“拟情词”的概念,意思是“在艺术仿象中传输主观情感”,除此之外,其他学科对于“拟情”的定义较为模糊,出现了“拟情表达机制”“拟情关系”等使用方法,但含义差别较大。本文所使用的“拟情”更偏向计算机科学领域,定义是“模拟情感”,在人机共情的语境下,“拟情”就是通过计算和编写程序使得情感得以量化,然后与人类的情感模式进行比对,最终实现机器人和人工智能对人类情感的“模拟、仿造乃至替代”。对于“共情”的定义,精神分析学和心理学普遍认为移情仅仅是一种情感的转移或投射,是个人行为,但共情在本质上是A对B的一种理解或把握(认知层面);Mayeroff指出,共情是一种更深层次的换位思考,双方同时共情会达到“你中有我,我中有你”的效果。因此,本文语境内的“共情”,含义是“建立在人机多次交互、情感多次转移交流之后的一种高阶情感氛围和效果”,也就是最后实现的一种情感效果。
在旧有的人机关系视角中,人类才是中心,而机器人是被边缘化的、被凝视的、被操控的他者,而在智能机器人时代,人机共情恰恰提供了全新的“机器人视角”,机器人会观察、感知人类情感,人类会对机器人“移情”,将它们视作同类,这种视角转变来源于媒介等同理论(Media Equation)。
媒介等同理论由Byron Reeves和Clifford Nass提出,该理论认为人们无意识地将机器人人格化,视其为具有社会属性的真实的“人”,并根据机器人产生的一系列社会化线索等与其互动,产生社会化的反应。该理论有三大核心概念。
一是社会行动者。社会行动者,是在复杂的社会场域中进行某些行动、做出某些行为的角色。因为在媒介等同理论中,计算机被视作可与人类直接互动的对象,是积极的社会参与者,这一概念的提出在一定程度上摆脱了“媒介是人的创造物”的工具论的束缚,机器人从“人类的工具”逐渐演变为“人类可交流的伙伴”,具有能动性和组织社会的力量。二是社交规则。社交规则,是在人际交往中用以约束和规范社会行为的规则,与法律相比具有非强制性。在机器人与人类的交往中,设计者们通常会将社交规则考虑进去,比如人类社会中的表扬与批评、以情动人、以礼相待、区分善恶等。研究者会通过给机器人输入社交规则的编程,提高机器人的拟情能力,从而达到更好的社交效果。三是社交线索。社交线索,是在社交过程中可以提供判断的信息,比如面部表情、语言暗示、行为举止等。媒介等同理论的出现,印证了人类能够将机器人看作社会交往的伙伴,且这种想法是无意识的,媒介本身变成具有主体能动性的人,这证明了人与媒介之间的互动关系是存在的,人与机器人发生共情具备可能性,同时媒介等同理论中的“社交线索”“社交规则”等概念,为本文建构的“移情—拟情—共情”的新型人机共情模型奠定了理论基础。
本文综合计算机科学领域的智能体共情的计算机模型,以及传统的共情、移情理论,结合人工智能领域的研究,尝试建构一个完整的“移情—拟情—共情”的新型人机共情模型(见图1)。“人机共情”的第一步是人类有移情需求,包括以下三点:生活在“倦怠社会”的人们处于信息过载、社会比较、社交倦怠之中,急需情感的出口;机器人陪伴作为一种医疗方法,或许可以缓解孤独;机器人本身是人类“脆弱性”心理的镜像投射,人类与机器人共情,实际上是在“对镜自怜”。“人机共情”的第二步是机器人的拟情,即机器人模拟情感,机器人的“共情双加工模型”可以对生理线索、社交线索进行共情评价,通过情感计算后筛选出适合当前场景的情绪,并通过视听、语言、肢体动作符号表达情感,从而达到进阶的共情效果。
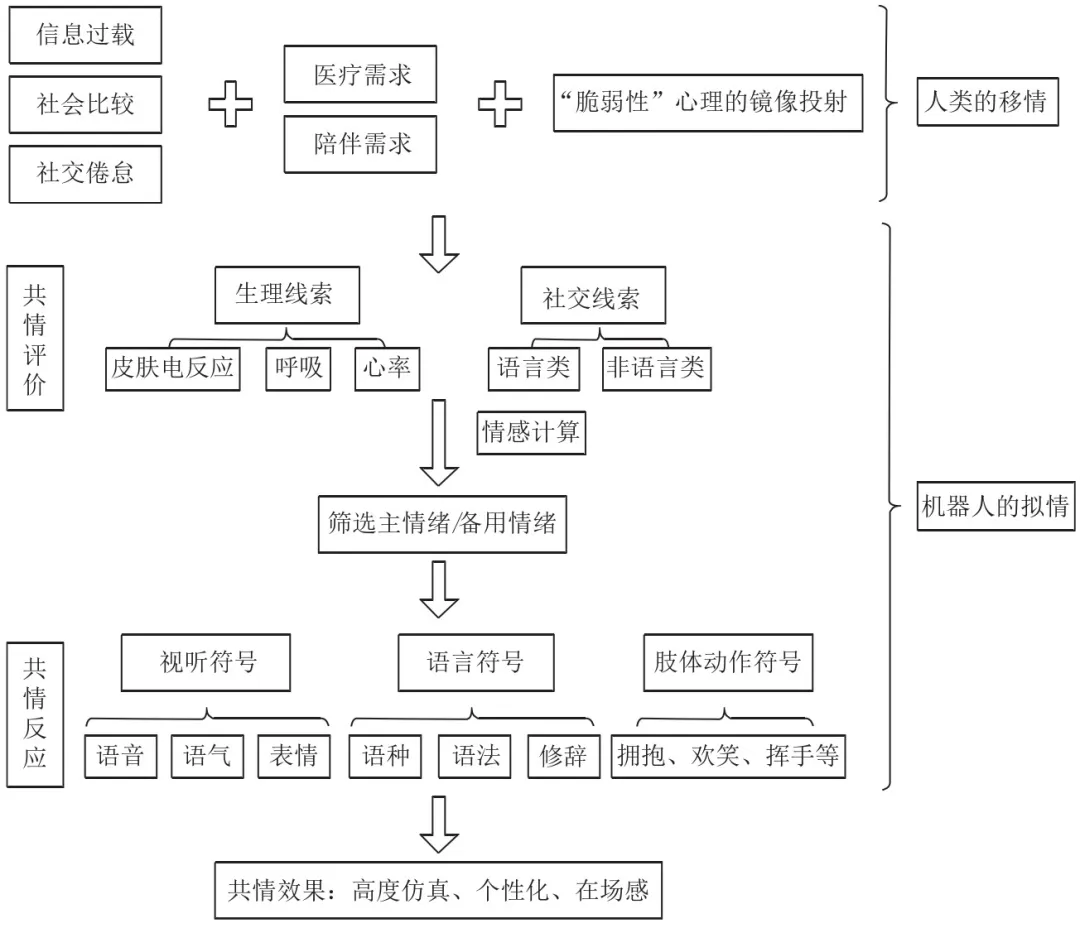
图1“移情—拟情—共情”的新型人机共情模型
(一)人类的移情:“人社交”的倦怠疗愈与“脆弱性”心理的镜像投射
在本文所构建的新型人机共情模型中,人类移情的方向是“人→机器人”,当人类赋予机器人以丰富的情感,它实质上是一种“人化”,将无生命之物赋予鲜活的人格。人类首先发生移情是人与机器人最终共情的先决条件,而人类也有向机器人移情的需要,尤其是当下。人们正处在一个抢功绩的社会,社会发展的精密齿轮飞速转动,过量的信息、过量的积极性溢出,早已“阉割”了人们拒绝社交的能力,因此,人们逐渐为过量的社交所累。《光明日报》曾在2020年做过一项“来说一说你也有所谓的社交恐惧吗”的调查,97%的参与者表示自己存在社交恐惧现象,网民似乎整体陷入了“社交媒体倦怠”。信息过载、消极的社会比较等因素造成“人社交”问题重重,人类进入“倦怠社会”。长期处于“线下独处、线上热闹”状态中的人们,需要有一个倾诉苦闷、缓解压力、纾解疲惫的情感出口,此时机器人的出现,恰好补全了人们情感的缺口,成为疗愈“群体性孤独”和“社交倦怠”的可靠伙伴。除此之外,需要陪伴的孤寡老年群体、需要情感引导的自闭症患者,也会将个人情感转移到机器人身上,将他们视为值得信赖和依恋的朋友、伙伴。
人们与机器人同喜同悲,也期待着与他们建立感情,这种情感转移,很有可能是因为他们没那么完美,这种漏洞恰恰提供了人类的“脆弱性”镜像。正如同人们爱偶尔犯错的英雄一样,“漏洞”令机器人的形象更鲜活,所以人们没有把他们视作钢铁巨人,而是把他们视作一个不那么完美的伙伴。当人类与机器人进行对话时,人类坦然地展现自己的不完美,而机器人具备“忠实树洞”属性,他们接受交流者不完美的习惯、倾听他们的压力与不安、倾听人类最真实的想法与全部的脆弱故事。在某种意义上,机器人是另一个自己,人们通过与机器人持续互动,逐渐将机器人“驯化”为自己独特的朋友,他们的情感连接也是独一无二的,机器人的独特属性增强了人类向机器人倾吐心事、与机器人交流的欲望,人类逐渐将智能媒介等同于真实的伙伴,人类情感向机器人偏移、人类对机器人产生同理心的可能性大大增加。
(二)机器人的拟情:基于生理和社交线索的共情评价与共情反应
人类对机器人产生了移情,机器人作为社会行动者,同时会基于生理和社交线索进行判断、进行情感的计算和模拟,最终做出回应,实现“拟情”。机器人模拟情感需要两个情绪加工过程,也就是“共情双加工模型”。该模型主要从计算机科学的角度描述了智能体共情包括两个加工过程:首先是机器人需要对人类共情反应进行特征提取分析,其次是通过机器人所产生的行为反应来体现共情的内在机制。本文将结合人机传播和人工智能领域的研究,详细描述机器人进行“情绪双加工”的两个过程:共情评价和共情反应。
首先,机器人需要一个共情评价体系,他们需要在人机互动的场景中,进行语言、体态等要素的识别,筛选出与识别对象相一致的情绪;其次,他们通过对情绪类型与场景间的相关性进行计算,遴选出适合当前情境的行为,从而对人类产生共情反应。
1. 共情评价
共情评价是对传播情感的敏感性识别、模拟,在共情评价系统驱动下,机器人主体会根据相关的生理和社交线索对所发生的事件进行评估。所谓社交线索,是指在人际交往中,特定信息通道所载有的、能够为交往的进行提供判断依据的特定讯息。对于社交线索的研究,Clifford Nass等人曾在1993年和2004年分别梳理了语言类和非语言类社交线索(见表1),语言类社交线索包括语言的使用和声音,非语言类社交线索包括脸、情感表现、参与用户的互动和关注、社会角色等,并指出社交线索是媒介等同理论发生的先决条件,影响着社交效果。
表1 Clifford Nass等人分别在1993年和2004年提出的八大社交线索
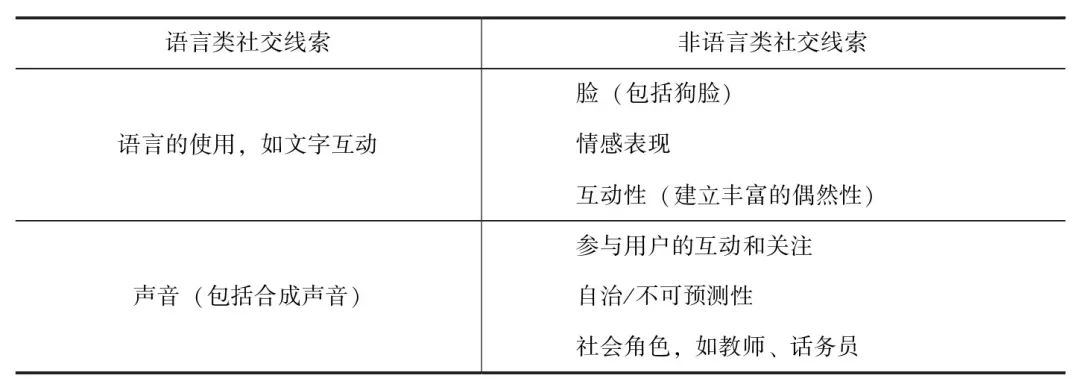
根据不同的社交线索,机器人可以特异性识别和提取交流对象的音频、表情、社会角色等信息。除此之外,机器人还会进行生理线索的识别,即通过测量生理信号如皮肤电反应、呼吸、心率、体温等,得到情绪的客观指标,从而辅助后续的情感计算。
2. 共情反应
当机器人观察到人类的情绪之后,会进行对应情感的表达,主要通过视听、语言、肢体动作符号来传情达意。Fong等人分别从机器人的面部表情、言语、肢体语言三个方面考察了社交机器人的情感表达机理。
在视听符号方面,机器人会选择兼具语音、语气、表情等符号元素,比如悲伤、愤怒的语音语调。在语言符号方面,涉及对人类的语种、语法、修辞的把控,机器人会根据共情对象所属的地理位置、高低语境文化,来设置不同的语言习惯。面部表情及语音是情感表现的最直接通道,因此,基于面部表情与语音理解的情感表现技术一直是研究的热点。在肢体动作符号方面,机器人对触感、亲密度、互动程度也有更精细、更个性化的设计。现在人们多采用基于运动捕获和运动数据重用与合成技术,将真人作为动作捕捉对象,最后让机器人进行个性化学习,以更充分地体现虚拟智能体个体间的行为差异。
(三)共情效果进阶:“耳鬓厮磨”式的亲密交流与个性化传播
在当下的互联网社会,泛在的弱连接使得人们的交流充满了猜疑、不确定,纵使VR、AR等技术的出现使不少人持乐观态度,认为VR影像更能激发人们的共情心理,是“终极共情机器”,但实质上VR共情依旧在虚拟世界,人们的身体依旧是“缺席”状态,内心依旧是空虚的,“身体缺席的人媒关系失去了设身处地和眼见为实的临场感,受众缺乏能动性的时期在传受双方的信任危机中走到了尽头”。
因此,对于“耳鬓厮磨”式的亲密交流,人们依旧是心向往之,而实体机器人的情感交流回归了“面对面传播”的传统,相较于互联网虚拟社交和VR共情来说,“人机共情”更具有进阶效果,具备个性化和在场感的双重属性。一方面,机器算法实现了对人类行为的精细判断、揣摩,每一次的共情体验都是独一无二的、个性化的,机器人充当人类的树洞,根据不同交流对象,根据他们特殊的喜好和交流习惯,给予不同的情绪反应;另一方面,机器人的手势眼神交互、肢体接触等都提供了在场感,提高了信息感知的真实度和清晰度,弥合了当下互联网社会虚拟社交中“人人共情”的鸿沟。
智能机器人时代的人机共情,建立了人机信任关系。因为相较于传统互联网媒介时代,与其说机器人是交流媒介,不如说他们更像是人类真诚可靠的伙伴、值得信赖的朋友、有行为自主性的社会行动者,可以与人们同欢笑共喜乐。日本学者Minosu Asada对未来的人机情感进行了畅想,认为未来机器人能够识别情感,模拟、拥有情感,“他们善解人意、唤醒同情,向人类提供身体和精神上的支持”。
三、“机器心”“天使心”:人机共情的思考与未来展望
光滑幼嫩的面容、好奇观察世界的大眼睛、温柔的话语,哪怕是在哭闹中也如同婴儿般可爱,日本“柔情机器人”Affetto的出现俘获了世人的心,让人忍不住想去触碰、拥抱、爱抚他,尤其是渴望养育孩子的夫妇。在人类的设想中,“机器心”永远美丽、纯洁,他们如同天使一般,柔声细语体察人意,在社交互动中处处体贴入微。
但是,是否机器人永远是以天使的形象存在呢?尽管人机共情的新型情感的表达方式丰富多彩,但是在现实应用中的效果不会总是尽如人意。首先是目前情绪价值受限的问题。Robert Plutchik的“情感之轮”理论认为,人类所表现出的情感特征起码有224种,因此人们质疑全方位模拟情感的说法,并提供了一些证据:虽然市面上已经出现了一些陪护型机器人,但他们的互动和情感交流极为有限,机器人也常常因为僵硬的情感反馈而被投诉。而相较于机器人迟钝的情感反馈,人类在体察情感方面可能更加敏锐,反应也更加迅速、深刻、丰富。Roomba扫地机器人的真实案例证明,随着时间的推移,人类会对Roomba产生一种强烈的感激之情,因为他能清洁人类的家。相较于机器人提供的即时性反馈,人们似乎更愿意与其建立长期的关系,因而,这种非对称性的情感交流最后可能导致人类对机器人投入了长久的、深刻的感情,而机器人却变成了淡漠的“魔鬼”,对人类编码之外的情感表达无动于衷。
其次是目前各界对于“机器人是否能自主性拥有意识”的疑惑。机器人在“拟情”时,需要程序开发者设计一套海量的情感词语库,“人工智能所获得的感知智能、认知智能、行动智能、创造智能都来自特定社会的数据”。因此,争议点在于,人们创造的情感机器人在外观上非常像人类,是“人类身体”,甚至是人类身体的完美版本,但他的心仍然是一颗“机器心”,他们所表现出的“与人类共情”,例如对人类的关心照拂、生气开心,甚至是种种欲望,背后都是程序开发者把人类社会的欲望编码到机器人的大脑中。简而言之,机器人的情感模拟可能仍停留在模仿阶段,仍然是在模仿人类的情绪,机器人本身是否能够脱离程序或算法,产生自主性的“共情”呢?
最后是机器人的发展正处于第四次浪潮,前三次浪潮中机器人分别拥有了逻辑搜索、预测性分析、识别路况等技能。目前,机器人研发领域在人机社交方面已经取得了很大进展,主要集中在护理病人、料理家务、陪伴老人小孩、照顾残疾人等方面,这类机器人能够对触摸、拥抱、语言有灵活生动地反应,例如由麻省理工学院媒体实验室开发的具有面部表情、能模仿人类情感的机器人Kismet,日本研发的陪伴型社交机器人小海豹Paro,等等。而现在,美国哥伦比亚大学Hod团队开发出一款可以自主认识自己身体的智能机械臂,随后又研发出粒子机器人、自主机器人(Emergent Self-Model)。机器人可以在没有人类的代码命令的情况下,基于自我摸索创建的形象来决定如何往前移动。Hod团队表示,这个机器人能完成自我进化,可以自己做测试,他拥有人类的创造力、想象力。这证明了机器人其实是可以脱离算法程序存在的,目前机器人已经具备了一定的自主性,在学习的过程中存在自我意识,会自我调整、自我想象、自我创造,那么未来,模拟的爱演变为真正的爱,具有极高的可能性。
四、结语
在媒介技术深度嵌入人类身体、生活的当下,同理心对于构建和谐美好的线上线下环境具有非常重要的意义。如今,“人社交”问题重重,人类的交往在网络的弱连接中依靠标签无机聚合,犹如在无边的丛林中透过枝丫缝隙寻觅同类,狂欢是虚拟的、愉悦是转瞬即逝的、情感是难倾诉的,而机器人作为“忠实的伙伴”,他的“天使心”柔情地抚慰那些有情感创伤、需要疗愈的圈层群体,能够与人进行积极的情感互动。除了社交方面,人机共情还可以显著改进未来的生产系统和转变人类工人的角色,比如准确评估人机协作过程中的人类体力负荷、认知负荷以及心理反应(如情绪)。由此可见,新型人机共情关系打破了传统的人机边界,人机情感关系正在被深刻改写,人们获得了更丰富的情感体验,而人机共情激发的情感体验也在不断优化,加速了人机共存时代的到来。
未来人机共情研究的重点,首先,应该跳出窠臼,超越人类中心主义的传统视野,不断丰富人们对于情感问题的认识,意识到实现共情是实现人机交流的必要条件,更是人类面对去人类中心主义的后人类时代所必需的生存策略;其次,研究讨论机器人情感落地的多种可能性及其方式;最后,除了促进神经科学和计算机科学的成果深度交融外,机器人共情能力的获得,需要到真正的人机社会生活中寻找突破,在未来,人类学习与机器人学习应齐头并进,共同建构一套适配未来人机社会交往的伦理道德范式。或许,在不久的未来,被编码的“机器心”能演变为真正能哭能笑、同情苦难、同喜同悲的“天使心”。
备注:全文引用及参考文献从略
引用参考
徐明华,王美琳.“人型电脑天使心”:人机共情的理论基础与实践路径探析[J].传播创新研究,2022(02):129-142+249.
作者简介
徐明华,华中科技大学新闻与信息传播学院传播系教授、博士生导师,研究方向为情感传播、跨文化传播、国际传播、传播理论、人工智能技术的创新应用等。
